III. Liquid Metal Robots | |||
| We focus on the actuation ability of the liquid metal and its applications in robotics. This project involves collaboration between multinational groups between Australia, UK, US, and China which are expertise in robotic systems, liquid metal alloys, and microfluidics. | |||
III.1 Wheeled Robot | |||
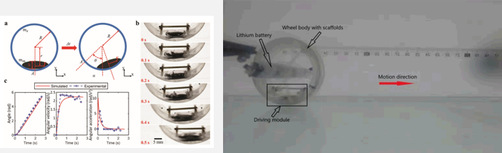
 | The controlled actuation of gallium liquid-metal (LM) alloys has presented new and exciting opportunities for constructing mobile robots with structural flexibility. However, the locomotion of current LM-based actuators often relies on inducing a gradient of interfacial tension on the LM surface within electrolytes, which limits their application outside a liquid environment. In this work, a wheeled robot using a LM droplet as the core of the driving system is developed that enables it to move outside liquid environment. The LM droplet inside the robot is actuated using a voltage to alter the robot's center of gravity, which in turn generates a rolling torque and induces continuous locomotion at a steady speed. An untethered and self-powered wheeled robot that utilizes mini-lithium-batteries is also demonstrated. This study is envisaged to have the potential to expand current research on LM-based actuators to realize future complex robotic systems. | ||
| |||
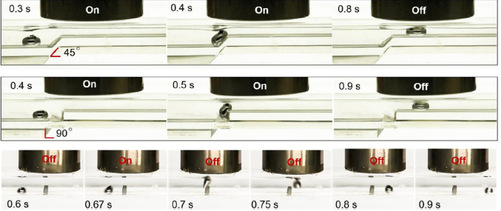
| The rolling motion of the wheeled robot | |||
| The work has been reported by New Scientists, RUPTLY, SCMP, CCTV, 光明日报, 新华社, 科技日报, 中国新闻社, 中国科学报, 科技纵览 etc. It was also seletced as Top 10 Annual Research Achievement Award in Annual Conference of China Robot Industry, 2019. | |||
| A Wheeled Robot Driven by a Liquid Metal Droplet, Jian Wu, ShiYang Tang*, Tao Fang, Weihua Li, Xiangpeng Li*, and Shiwu Zhang*, Advanced Materials 30(51) 1805039, 2018. Video can be download from Wiley Online Library | |||
III.2 Liquid Artificial Muscle | |||
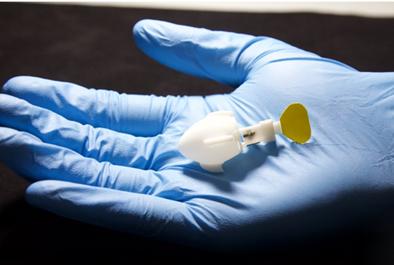
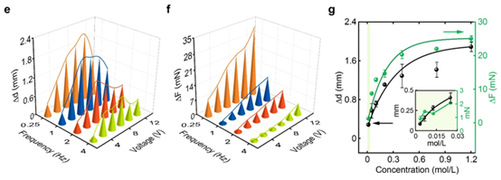
Here, a liquid metal artificial muscle (LMAM) is demonstrated, based on the electrochemically tunable interfacial tension of liquid metal to mimic the contraction and extension of muscles. The LMAM can work in different solutions with a wide range of pH (0–14), generating actuation strains of up to 87% at a maximum extension speed of 15 mm s−1. More importantly, the LMAM only needs a very low driving voltage of 0.5 V. The actuating components of the LMAM are completely built from liquids, which avoids mechanical fatigue and provides actuator linkages without mechanical constraints to movement. The LMAM is used for developing several proof-of-concept applications, including controlled displays, cargo deliveries, and reconfigurable optical reflectors. The simplicity, versatility, and efficiency of the LMAM are further demonstrated by using it to actuate the caudal fin of an untethered bionic robotic fish. The presented LMAM has the potential to extend the performance space of soft actuators for applications from engineering fields to biomedical applications. | |||
| |||
Liquid metal artificial actuates a miniature robotic fish | |||
| A Liquid Metal Artificial Muscle.Jian Shu#, Du-An Ge#, Erlong Wang#, Hongtai Ren, Tim Cole, Shi-Yang Tang*, Xiangpeng Li, Xiangbo Zhou, Rongjie Li, Hu Jin*, Weihua Li, Michael D. Dickey, Shiwu Zhang*. Advanced Materials 33 (43), 2103062, 2021 | |||
III.3 Liquid Metal Motor | |||
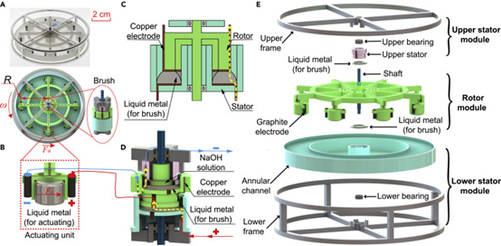
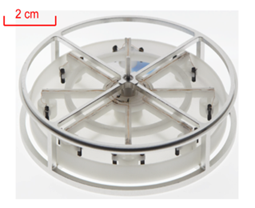 | In this work, a motor is developed based on the electrical actuation of liquid metal droplets without the need for conventional electromagnets. The approach is distinguished by (1) the encapsulation of electrolyte and multiple liquid metal droplets within an enclosed system, and (2) the creation of stable and continuous torque outside a liquid environment. In addition, a liquid metal electrical brush is introduced to operate the motor with low friction and low wear. The unique driving mechanism endows the motor with several advantages, including low friction, no sparking, low noise, versatile working environment, and being built from soft materials that could offer new opportunities for developing soft robotics . | ||
| |||
The structure of the liquid metal motor and its actuating | |||
| Liquid metal motor, Erlong Wang#, Jian Shu#, Hu Jin#, Zhe Tao, Jie Xie, Shi-Yang Tang*, Xiangpeng Li*, Weihua Li, Michael D.Dickey, ShiwuZhang*. iScience 24(1) 101911, 2021. A Vedio can be found on youtube | |||
III.4 Untethered Vehicle | |||
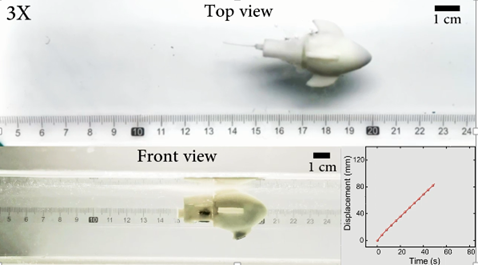
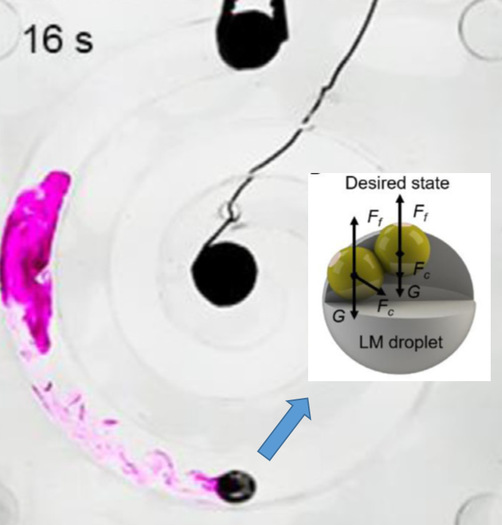
 | In this work, we report the development of a novel controllable untethered vehicle driven by electrically actuated liquid metal droplets in a sodium hydroxide solution. The vehicle driven by liquid metal droplets possesses many advantages such as working silently, almost wear-free motion, low cost, and low-power consumed, which has great potential to be applied in liquid metal enabled robotics and automation process such as laboratory automation. | ||
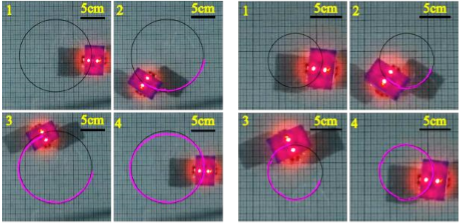  | |||
Circular Locomotion, straight translational motion, and sinusoidal locomotion | |||
| A Controllable Untethered Vehicle Driven by Electrically Actuated Liquid Metal Droplets, Xiangxiang Li, Jie Xie, Shi-Yang Tang, Ronald Xu, Xiangpeng Li*, Weihua Li and Shiwu Zhang*. IEEE Transactions on Industrial Informatics, 15(5): 2535-2543, 2019. Video can be download from IEEE Xplore Digital Library | |||
III.5 Liquid Metal Droplet Robot | |||
 | Here, we propose a composite liquid metaldroplet robot (LMDR) which appears as a LM droplet but exhibits an extraordinary actuating performancein 3D space. The LMDR is fabricated by assembling a hollow and spherical-shaped magnetic internalframework (IF) into a LM droplet, and the IF can be disassembled from the LM droplet with the application of an external magnetic field. The maneuver of the LMDR is realized using the interplay of electric andmagnetic fields, and complex actuation especially jumping to avoid obstacles, climbing steep slopes, and rotating its body to the desired posture can be achieved. The hollow IF within the LMDR has a cargocarrying capacity and we demonstrate a proof-of-concept experiment to show the transportation and controlled release of a chemical indicator using the LMDR.The demonstrated capabilities of the LMDR present a promising potential in developing future targeted drug delivery and soft robotic systems with high controllability and multi-functionalities | ||
 | |||
Climbing motion and jumping motion of the LMDR | |||
| Liquid Metal Droplet Robot, Fangxia Li#, Jian Shu#, Leran Zhang#, Nailin Yang, Jie Xie, Xiangpeng Li*, Liang Cheng, Shaolong Kuang, Shi-Yang Tang*, Shiwu Zhang*, Weihua Li, Lining Sun, Dong Sun. Applied Materials Today Volume 19, June 2020, 100597 | |||