I. Bioinspired/biomimetic Robots | ||||||
| This work investigates an array of solutions to meet the multifaceted requirements of developing intelligent bionic robots. The robots include underwater robot, multi-locomotory-modal robot, legged robots, and amphibious robot. The work introduces transformable locomotory mechanism and variable stiffness mechanism actuated by smart materials into robot locomotion in various environments, with which the robots are capable of perceiving and understanding dynamically changing or unstructured environments, and planning their own actions to attain a certain goal. | ||||||
I.1 Amphibious Robot | ||||||
AmphiHex-1 | ||||||
 | An amphibious robot can locomote in amphibious environments,including walking on rough terrains, maneuvering underwater, and passing through soft muddy or sandy substrates in the littoral area between land and water. However, developing an amphibious robot is challenging, especially when it requires a high locomotory performance in soft substrates and acombination of different propulsion methods. To tackle such a challenge, an amphibious robot, known as AmphiHex-I, with novel transformable flipper-leg composite propulsion mechanisms has been proposed and developed. | |||||
| ||||||
| Design concept / Transition;with transformable flipper-leg;/ Detection of Oncomelania hupensis beside Changjiang River AmphiHex-I: Locomotory Performance in Amphibious Environments with Specially Designed Transformable Flipper-legs Shiwu Zhang*, Youcheng Zhou, Min Xu, Xu Liang, Jiming Liu, and Jie Yang. IEEE/ASMETransactions on Mechatronics. 21(3): 1720-1731, 2016 | ||||||
AmphiHex-II | ||||||
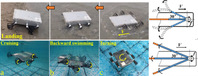
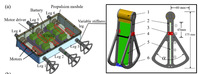
 | We developed a newly designed amphibious hexapod robot-AmphiHex-II. This robot possesses six newly designed variable stiffness legs for adapting various complex environments. This novel design of the variable stiffness leg seamlessly incorporates the advantages of both semicircular walking legs and the swimming fexible fippers. The legs are constructed by rigid fan-shaped frames, which work as walking legs for terrestrial locomotion and protect the contained flexible fippers used for aquatic locomotion during terrestrial operations. The stiffness of legs can be adjusted to an effective degree by adjusting the positions of sliders manually. | |||||
| ||||||
| Structure of the robot and the variable stiffness leg.............Landing and swimming;with the variable stiffness legs On a CPG-based Hexapod Robot: AmphiHex-II with Variable Stiffness Legs, Bin Zhong, Shiwu Zhang*, Min Xu, Youcheng Zhou, Tao Fang, Weihua Li*, IEEE/ASME Transactions on Mechatronics. 23(2) 542-551, 2018; Video can be download from IEEE Xplore Digital Library | ||||||
AmphiHex-III | ||||||
 | AmphiHex-III is under development in cooperation with Prof. Haoyao Chen from Harbin Institute of Technology (Shenzhen) | |||||
I.2 Adaptive Propulsion | ||||||
 | This work aims to explore the methods to improve the prosulsive performance of bioinspired propulsion mechanisms, inclduing ununiform distribution of stiffness,variable stiffness, variable shape and variable area, etc. The magnetorheological-fluid /magnetorheological-elstomer (MRF/MRE) based variable stiffness mechanisms can perform a rapid switch between designed stiffnesses, which can benifit the locomotion of the robots in complex environments and/or for changing tasks. | |||||
| A highly stiffness-adjustable robot leg for enhancing locomotive performance, M.D.Christie, S.Sun*, D.H.Ning, H.Du, S.W.Zhang*, W.H.Li. Mechanical Systems and Signal Processing, Volume 126, Pages 458-468, 2019 | ||||||
| Design and modelling analysis of a changeable stiffness robotic leg working with magnetorheological technology, Zijun Jing, Shuaishuai Sun, Yiming Ouyang, Shiwu Zhang*, Weihua Li*, Jinjin Zheng. Journal of Intelligent Material Systems and Structures. Vol. 29 (19): 3725-3736, 2018 | ||||||
| A torsional MRE joint for a C-shaped robotic leg, M D Christie, Shuaishuai Sun, Donghong Ning, Haiping Du, Shiwu Zhang* and Weihua Li*, Smart Materials and Structures 26(1): 015002, 2017 | ||||||
| Theoretical and experimental study on a compliant flipper-leg during terrestrial locomotion. Tao Fang, Youcheng Zhou, Shikun Li, Min Xu, Haiyi Liang, Weihua Li, Shiwu Zhang*. Bioinspiration & Biomimetics 11(5):056005, 2016 | ||||||
| A Highly Adaptive Magnetorheological Fluid Robotic Leg for Efficient Terrestrial Locomotion. Nan Jiang, Shuaishuai Sun, Yiming Ouyang, Min Xu, Weihua Li, Shiwu Zhang*. Smart Materials and Structures 25(9):095019, 2016 | ||||||
| Development of a bio-inspired transformable robotic fin. Yikun Yang, Yu Xia, Fenghua Qin, Min Xu, Weihua Li, Shiwu Zhang*. Bioinspiration & Biomimetics 11(5):056010, 2016 | ||||||
I.3Underwater Robot | ||||||
Bio-inspired Long Fin Underwater Robot | ||||||
| The developed bioinspired long-fin underwater robot possesses a high maneuverability. It can perform a turning maneuver with zero turning radius. The highest swimming speed is about 50cm/s. | |||||
| The work is in cooperation with Prof. Fenghua Qin from Department of Modern Mechanics, USTC | ||||||
| Paper is under preparation | ||||||
Bionic Scallop Robot | ||||||
 | Inspired by a scallop's special underwater propulsion mechanism, we designed and prototyped a scallop robot capable of clapping and swimming. In this work, an artificial velum was used to work as a check valve to stimulate the robot’s swimming. A couple of supporting plates were fixed on the robot shells to achieve the modulation of clapping process of the shells. The scallop robot can move at a maximum average and instantaneous speed of 3.4 and 4.65 body length per second, respectively. This scallop robot provides a new propulsion mechanism in underwater bionic robots; it is also of help to understand the swimming principle of scallops in terms of jet propulsion and clapping motion. | |||||
| Development of a Biomimetic Scallop Robot Capable of Jet Propulsion, Yumo Wang, Shunxiang Pang, Hu Jin*, Min Xu, Shuaishuai Sun, Weihua Li, Shiwu Zhang*, Bioinspiration & Biomimetics 15(3):036008, 2020 | ||||||
Integrative Biomimetic Robofish | ||||||
 | Flying insects and swimming fishes have high effiency and high maneuverability in air and water, respectively. Their wings and fins have evolved for many ages to adapt to propelling in the complex environment. Here, an integrative biomimetic robotic fish is proposed and developed,which combines the advantages of insect wings and fish fin to achieve a high agility underwater. In the robotic fish, two caudal fins were equipped at the tail of the robotic fish in parallel as the main propulsion mechanism, the opposite flapping of the two caudal fins generates mutually opposing lateral forces during cruising, which leads to a stable and high-performance swimming. In addition, two pectoral fins that mimic the function of insect wings were equipped at two sides of the robotic fish, which enhances the robotic fish maneuverability in vertical plane. Moreover, a central pattern generator model was designed to achieve the versatile maneuvering motions, motion switching, and autonomous swimming with an obstacle avoiding ability. | |||||
| . | ||||||
| The work is in cooperation with Prof. Fenghua Qin from Department of Modern Mechanics, USTC. The latest prototype of the robotic fish with dual-caudal fins can swim with a high speed (about 3 BL/s) | ||||||
| . | ||||||
| Design and Control of an Agile Robotic Fish with Integrative Biomimetic Mechanisms. Shiwu Zhang*, Yun Qian, Pan Liao, Fenghua Qin, and Jiming Yang. IEEE/ASME Transactions on Mechatronics. 21(4): 1846-1857, 2016 | ||||||
Bionic Robotic Carp | ||||||
 | A carangiform robotic fish with 4-DoF (degree of freedom) tail had been developed. The robotic fish has capability of swimming under two modes that are radio control and autonomous swimming. Size: 650×80×200mm ;Weight:3.8Kg; Sink/Rise: 0.5m; Maximum Speed: 0.48m/s (0.8BL/s); Maximum acceleration: 0.4m/s2; Remote control/Autonomous Swimming /Avoiding obstacle. | |||||
| Parametric Research of Experiments on a Carangiform Robotic Fish, Qin Yan, Zhen Han, Shiwu Zhang, Jie Yang, Journal of Bionic Engineering, vol. 5(3): 95-101, 2008 | ||||||


 ......
......