海洋鸟类漂泊信天翁可以连续飞行几十天而不休息,飞行里程近15000公里;陆地上奔跑最快的动物之一猎豹,捕猎时最快速度能达到29m/s(104.4km/h),接近汽车在高速公路上飞速行驶的速度……自然界中动物特异的运动能力很大程度上得益于他们卓越的肌肉性能。受肌肉出色性能的吸引,人们对研制能够模仿肌肉运动如伸缩、旋转、弯曲等的人工肌肉越来越感兴趣。新兴的基于介电弹性体、刺激-响应聚合物、形状记忆合金(SMA)以及碳基复合物等材料的人工肌肉虽然相比于传统电气、液压、气压驱动器具有体积轻小、结构紧凑、价格低廉等优势,但其需要高驱动电压、应变小、响应慢等缺陷严重限制了它们的应用。
近日,中国科学技术大学工程科学学院中科院材料力学行为和设计重点实验室张世武教授、金虎副研究 员联合英国伯明翰大学唐诗杨博士、澳大利亚伍伦贡大学李卫华教授、苏州大学李相鹏教授以及美国北卡罗来 纳州立大学Michael Dickey教授组成的研究组提出了一种基于电化学方法改变液态金属表面张力的液态金属人工肌肉(LMAM)来模仿肌肉的收缩及舒张功能。LMAM能在不同pH溶液(0-14)中工作,最大伸展速度达到15mm/s,最大应变达到87%,另外,这种人工肌肉所需的驱动电压极小,舒张时驱动电压仅需0.5V, 收缩时仅需4V。该项工作有望为柔性驱动器在微机电系统、生物医学等领域的应用提供全新思路。相关成果以“A Liquid Metal Artificial Muscle”为题发表在 Advanced Materials上。
近年来,镓基液态金属由于其卓越的物化特性成为一大研究热点。镓基液态金属兼具液体和固体的一些特性,包括高电导/热导率,良好的柔性,毒性极低且不易挥发。此外,镓基液态金属极易被氧化形成表面氧化膜,未被氧化时,液态金属具有目前已知液体中最大的表面张力(>600mN/m),氧化后,液态金属的表面张力可降至接近0。联合研究组利用电化学方法快速、可逆地实现这两种状态的切换(图1a - c),同时,研究组通过机构设计,构造液桥,将液态金属液滴状态切换过程中的形态变化转化为驱动行程及驱动力。如图1d所示,液滴上下两端布置铜电极,其不仅为液滴提供氧化/还原电压,铜和液态金属优异的润湿性还使得液滴能被锚定在铜片上。液态金属液滴在上下铜电极之间形成液桥,电极提供氧化电压时(+4V),液滴从近球状变成扁平泥状,液桥对上基底的作用力向下,液桥高度降低,人工肌肉“收缩”;电极提供还原电压时(-0.5V),液滴从扁平泥状恢复成近球状,液桥对上基底的作用力向上,液桥恢复初始高度,人工肌肉“舒张”。在0.25Hz电压(4V到-0.5V)驱动下,人工肌肉能提供约20mN的拉力,40mN的推力,超过1mm的驱动行程(图1i)。
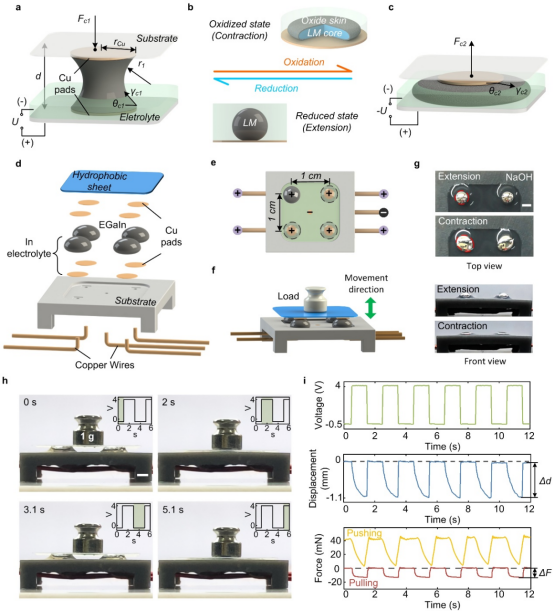
图1 液态金属人工肌肉的驱动
研究人员随后通过对驱动参数优化、驱动单元的串并联提升人工肌肉的性能。为了验证LMAM良好的驱动性能和应用潜力,研究展示了LMAM在编码显示、货物运载、可重构光学器件中的应用。研究人员还基于LMAM驱动开发了一种自主游动(untethered)的单尾鳍仿生机器鱼(图2)。尾鳍一端的两侧对称布置有两个LMAM驱动单元,两个单元的异步收缩-舒张驱动尾鳍连续摆动(图2b),从而驱动机器鱼向前游动。机器鱼仅由一节3.7V(80mAh)锂电池供电,驱动信号由内载MCU调制,在2Hz电压信号驱动下,机器鱼游动速度能达到10cm/min,续航时间达40min。

图2 基于液态金属人工肌肉的仿生机器鱼
该研究证实了基于液态金属液滴的柔性驱动器在低输入电压下具备卓越的驱动性能,为未来开发基于低功率驱动器机器人系统铺平了道路。工程科学学院博士研究生舒健、葛杜安、王二龙为论文共同第一作者,工程科学学院张世武教授、金虎副研究员,以及英国伯明翰大学唐诗杨博士为论文共同通讯作者。该研究工作得到了国家自然科学基金等项目资助与支持。
近日,联合研究组还提出了一种通用的光诱导液态金属液滴驱动方案:使用激光束选择性地激活电解液中的光电晶体管,从而利用马拉格尼力(Marangoni force)实现对液态金属液滴的电驱控制(图3)。该方案无需复杂和庞大的系统,简单利用光即可诱导多个液态金属液滴的并发运动、分裂和合并,研究人员也展示了其在光控继电器等方面的应用。这种用于操纵LM液滴的光诱导控制方法为在MEMS、现场可编程机器人和基于液滴的液体协作机器人领域的未来创新研究提供了新的方向和技术途径。相关成果以标题为“Light-controlled versatile manipulation of liquid metal droplets: a gateway to future liquid robots” 发表在Materials Horizons上,并被选为封底文章。

图3 光诱导液态金属液滴驱动 (a)光诱导液态金属驱动装置;(b)光诱导液态金属液滴沿特定图案运动;(c)和(d)光诱导液态金属驱动小车
此外,联合研究组还基于液态金属的电致驱动成功研制了一种无需任何常规电磁器件的液态金属电机(图4a),该电机利用电场在液态金属液滴两侧形成表面张力差,驱动电机转子旋转,输出力矩;为了克服传统固-固接触电刷摩擦力大,磨损消耗快,产生火花造成安全隐患等缺陷,研究人员还利用液态金属优异的导电性和较低的粘度,设计了一种固-液接触的液态金属电刷,该电刷能避免导线缠绕,有效保证电路连通,同时,其转动阻力比常规电刷小一到两个数量级。研究人员还展示了利用该电机驱动小车和小船分别在陆地和水中运动的应用(图4b , c)。该项工作有望弥补传统驱动器件的缺陷,启发液态金属在柔性机器人、微机电系统、柔性电子等领域的应用和发展。相关成果以 “Liquid Metal Motor”为题发表在Cell子刊 iScience上,并被Matter期刊作 Preview介绍。

图4 液态金属电机(a)液态金属电机结构图;(b)和(c)液态金属电机驱动的小车和小船;
AM文章链接:
https://onlinelibrary.wiley.com/doi/10.1002/adma.202103062
MH文章链接:
https://pubs.rsc.org/en/content/articlehtml/2021/mh/d1mh00647a
iScience文章链接:
https://www.sciencedirect.com/science/article/pii/S2589004220311081